Introduction
Pulse Width Modulation (PWM) generate an analog output waveform from microcontroller output pin. Enhanced Capture/Compare/PWM (CCP1) peripheral of PIC16F887 is able to generate analog output signal.
 |
| Block diagram of PWM module of CCP1 |
Pulse Width Modulation (PWM) generate an analog output waveform from microcontroller output pin. Enhanced Capture/Compare/PWM (CCP1) peripheral of PIC16F887 is able to generate analog output signal.
|
| Block diagram of PWM module of CCP1 |
Servo motor is a type of motor that rotate to specific degree assigned by a controller. Some motor rotates within 180 degree, while others rotate up to 360 degree.
 |
| A sample of servo motor from Ali Express |
Supply voltage is typically a +5V DC supply from microcontroller board. Its control signal is a TTL type logic level with a frequency of about 50Hz. Duty time of control signal is between 1.5ms to 2ms that rotate its angle between 0 and 180 degrees.
Controller needs to generate Pulse Width Modulation (PWM) signal with a frequency around 50Hz, with a variation of high time between 1.5ms to 2ms to rotate this motor. Without using PWM module of controller, programmer can create a software PWM routine instead. However this method has a timing latency.
 |
| Simulation of this program |
A POT connects to AN0 of PIC16F887 that's channel 0 of ADC module. Controller reads and converts this ADC value into timing value of output PWM signal generates a pin RD0. This pin controls the angle of rotation of servo motor.
MikroC Program:
Click here to download this example from GitHub.
Input signal to ADC channel of a microcontroller is other than DC voltage source. It typically range from 0 to 5V DC, as a conventional microcontroller, and voltage reference of ADC module are around +5V. Measuring input voltage within this range is straight forward using a calculation of ADC result and its step voltage size.
 |
| A DC +50V DVM using ADC of PIC16F887 MikroC - Program sample |
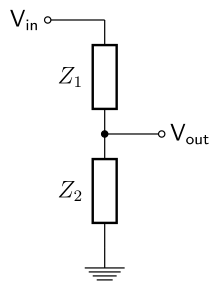 |
| Reference circuit from Wikipedia |
Dividing factor depends on value of these two resistor that we can not give its detail and formula here. Using this method we can design a simple digital volt meter (DVM) with a maximum range of +50V DC.
In this example we select Z1 = 100kOhm and Z2 = 10kOhm. This circuit gives an output dividing factor of 0.09 at Vout. So whenever input voltage Vin = 50V then output voltage 50V * 0.09 that is around 5V, which is the maximum input voltage to ADC input channel.
 |
| Circuit Diagram |
In this program timer0 is used to schedule ADC reading before it's converted to actual DC input voltage. Using its 8MHz internal oscillator source, timer0 interrupt creates a timer tick for scheduling ADC reading. Whenever the total tick equal to 30 it's a one second timing. Hence ADC reading is activated for every 30 timer0 tick (one second).
However multiplexing display doesn't use this timer tick due total lines of C source code.
MikroC source code: